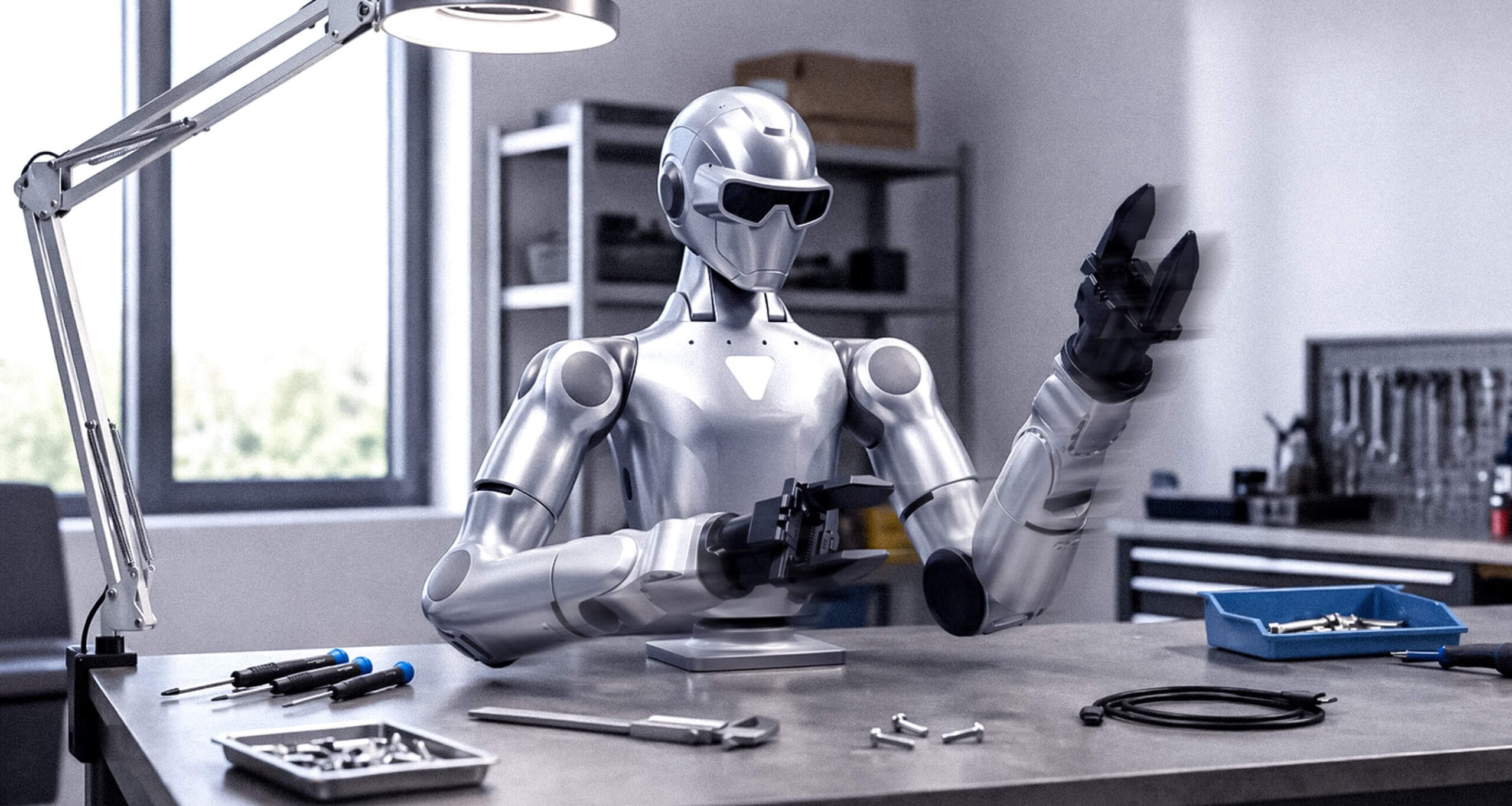
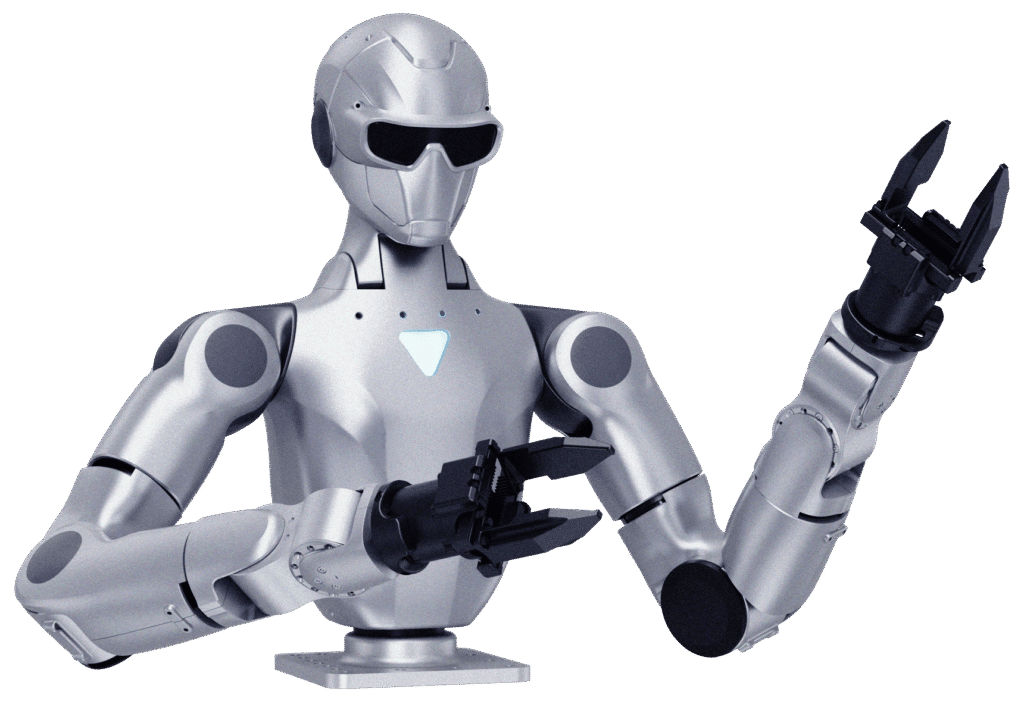
Robot humanoidalny z dwoma ramionami – błyskawiczne wdrożenie, możliwość zastosowania w wielu różnych sytuacjach
SERIA UNITREE R1-D
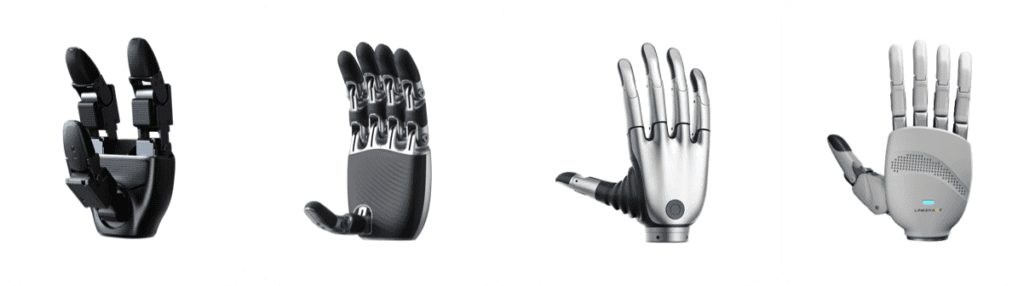
Unitree R1-D to zaawansowana platforma o wysokiej swobodzie ruchów (nawet do 22 DOF), która wyróżnia się niezwykłą mobilnością ramion oraz szerokim polem roboczym. Urządzenie oferuje dużą moc obliczeniową dzięki 8-rdzeniowym procesorom oraz systemowi wizyjnemu z kamerą binokularną, co w połączeniu z otwartymi interfejsami programistycznymi pozwala na błyskawiczne wdrożenie w wielu scenariuszach aplikacyjnych. Elastyczność robota zwiększa możliwość montażu na podstawie stacjonarnej lub mobilnej oraz opcja szybkiej wymiany końcówek roboczych, takich jak chwytaki dwupalczaste lub dłonie antropomorficzne.



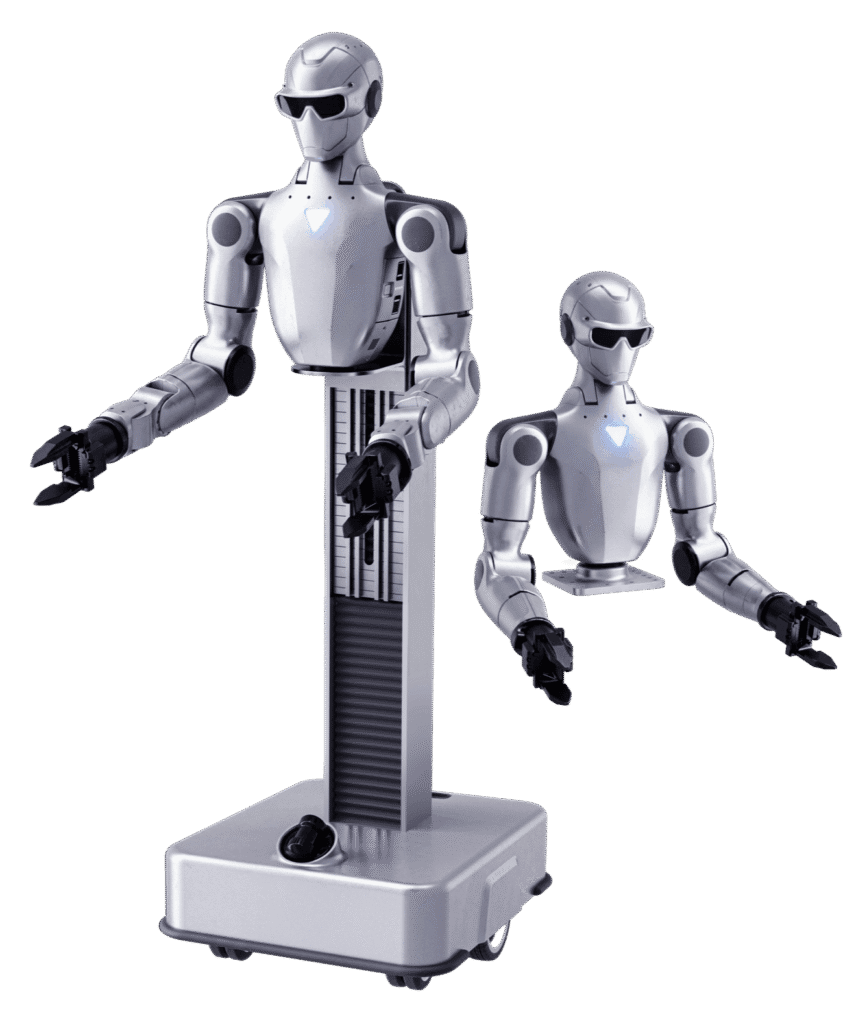
Wysokowydajny robot dwuramienny
Wysokowydajne silniki, przekładnie, enkodery i różnorodne czujniki robotyczne
Bardziej zróżnicowane metody interakcji
Konfiguracja wizualnych modułów obliczeniowych z dwoma kamerami oraz systemu interakcji głosowej
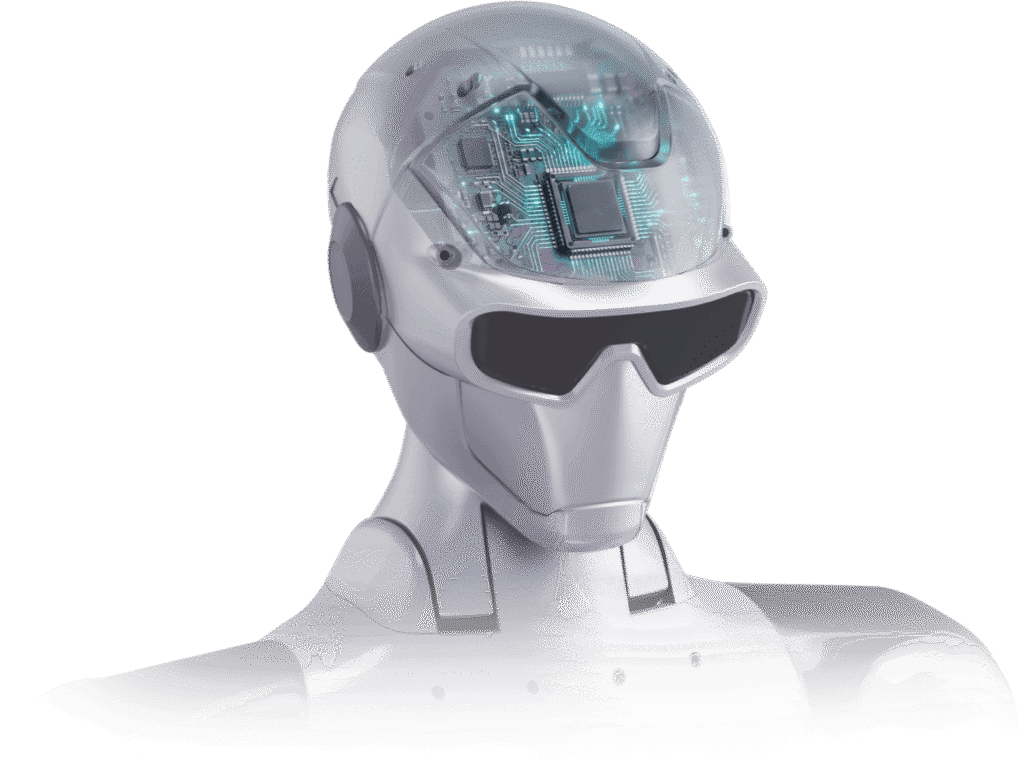
Tworzenie oprogramowania na platformie otwartej
Dojrzały framework do tworzenia robotów, który umożliwia kompleksowe tworzenie oprogramowania na poziomie podstawowym

Zakres ruchu stawu lędźwiowego (model D: ±35°)
Obrót wokół osi poziomej ±150° / ±35°
Zakres ruchu stawu szyjnego
Odchylenie w płaszczyźnie poprzecznej ± 115°, pochylenie w płaszczyźnie pionowej ± 36°
15~31
Łączna liczba stopni swobody
5×2/7×2
Stopnie swobody ramion
1
Stopień swobody w talii
2
Stopnie swobody głowicy
1–7 x 2
Liczba stopni swobody
Obsługuje dwa rodzaje mocowania:
Kompatybilny z dwoma ramionami robota:
Procesor głowicy: 8-rdzeniowy procesor o wysokiej wydajności
Moc obliczeniowa modułu głowicy: 10 TOPS
Procesor korpusu: 8-rdzeniowy procesor o wysokiej wydajności
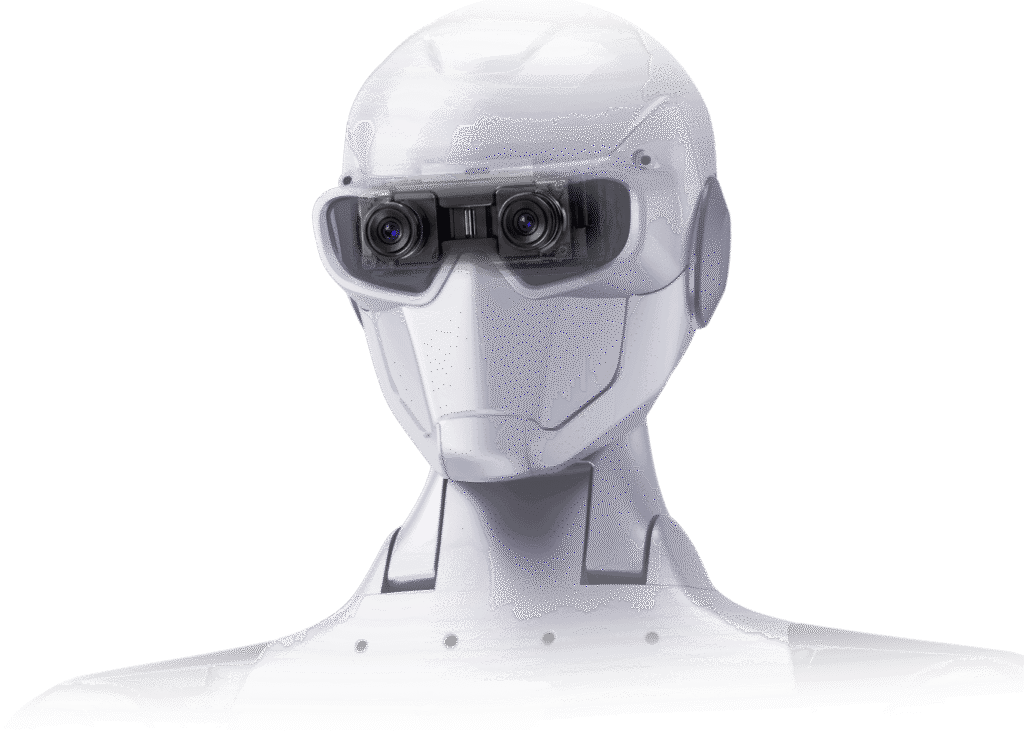
Pole widzenia modułu binokularowego: w poziomie 146°, w pionie 124°
Odległość między oczami: 60 mm
RGB: 1280×720 przy 30 Hz
544×448 przy 10 Hz

Otwarte interfejsy dla systemu bazowego, ramienia robota, audio, oświetlenia, sterowania wizualnego itp., obsługujące programowanie metodą „przeciągnij i upuść”
Współpraca głosowa
4-elementowy zestaw mikrofonów + podwójne głośniki
Współpraca wizualna
Moduł obliczeniowy z dwoma kamerami
Maksymalne obciążenie ramienia
2–4 kg
Dokładność zacisku końcowego
±0,1 mm
700 x 357 x 190 mm
835 x 357 x 190 mm
Po złożeniu: 683 x 520 x 440 m
Po rozłożeniu: 1600 x 520 x 440 mm
Po złożeniu: 683 x 520 x 440 mm
Po rozłożeniu: 1600 x 520 x 440 mm
Około 11 kg (z zewnętrznym zasilaczem)
Około 13 kg (z zewnętrznym zasilaczem)
Około 30 kg
Około 32 kg
15
19
18
22
5
7
5
7
1
1
1
1
2
2
2
2
/
/
3
3
Rolka krzyżowa + łożysko kulkowe poprzeczne
Rolka krzyżowa + łożysko kulkowe poprzeczne
Rolka krzyżowa + łożysko kulkowe poprzeczne
Rolka krzyżowa + łożysko kulkowe poprzeczne
Silnik PMSM z wirnikiem wewnętrznym o niskiej bezwładności i dużej prędkości obrotowej (doskonała dynamika i odprowadzanie ciepła)
Silnik PMSM z wirnikiem wewnętrznym o niskiej bezwładności i dużej prędkości obrotowej (doskonała dynamika i odprowadzanie ciepła)
Silnik PMSM z wirnikiem wewnętrznym o niskiej bezwładności i dużej prędkości obrotowej (doskonała dynamika i odprowadzanie ciepła)
Silnik PMSM z wirnikiem wewnętrznym o niskiej bezwładności i dużej prędkości obrotowej (doskonała dynamika i odprowadzanie ciepła)
60Nm
60Nm
60Nm
60Nm
2~4kg
2~4kg
2~4kg
2~4kg
Opcjonalny chwytak dwupalczasty / zręczna ręka trzypalczasta / zręczna ręka pięciopalczasta
Opcjonalny chwytak dwupalczasty / zręczna ręka trzypalczasta / zręczna ręka pięciopalczasta
Opcjonalny chwytak dwupalczasty / zręczna ręka trzypalczasta / zręczna ręka pięciopalczasta
Opcjonalny chwytak dwupalczasty / zręczna ręka trzypalczasta / zręczna ręka pięciopalczasta
420 mm
555 mm
420 mm
555 mm
Talia: odchylenie w płaszczyźnie poziomej ±150°
Głowa: odchylenie w płaszczyźnie poziomej ±115°
Odchylenie w płaszczyźnie pionowej ±36°
Talia: odchylenie w płaszczyźnie poziomej ±150°
Głowa: odchylenie w płaszczyźnie poziomej ±115°
Odchylenie w płaszczyźnie pionowej ±36°
Talia: odchylenie w płaszczyźnie poziomej ±35°
Głowa: odchylenie w płaszczyźnie poziomej ±115°
Odchylenie w płaszczyźnie pionowej ±36°
Talia: odchylenie w płaszczyźnie poziomej ±35°
Głowa: odchylenie w płaszczyźnie poziomej ±115°
Odchylenie w płaszczyźnie pionowej ±36°
Okablowanie z pustym rdzeniem + okablowanie wewnętrzne
Okablowanie z pustym rdzeniem + okablowanie wewnętrzne
Okablowanie z pustym rdzeniem + okablowanie wewnętrzne
Okablowanie z pustym rdzeniem + okablowanie wewnętrzne
Podwójny enkoder (ramię)
Podwójny enkoder (ramię)
Podwójny enkoder (ramię)
Podwójny enkoder (ramię)
Zasilanie zewnętrzne lub akumulator litowo-jonowy
Zasilanie zewnętrzne lub akumulator litowo-jonowy
Zasilanie zewnętrzne lub akumulator litowo-jonowy
Zasilanie zewnętrzne lub akumulator litowo-jonowy
Korpus: 8-rdzeniowy procesor o wysokiej wydajności
Głowica: 8-rdzeniowy procesor o wysokiej wydajności + 10 TOPS
Korpus: 8-rdzeniowy procesor o wysokiej wydajności
Głowica: 8-rdzeniowy procesor o wysokiej wydajności + 10 TOPS
Korpus: 8-rdzeniowy procesor o wysokiej wydajności
Głowica: 8-rdzeniowy procesor o wysokiej wydajności + 10 TOPS
Korpus: 8-rdzeniowy procesor o wysokiej wydajności
Głowica: 8-rdzeniowy procesor o wysokiej wydajności + 10 TOPS
Matryca 4-mikrofonowa
Matryca 4-mikrofonowa
Matryca 4-mikrofonowa
Matryca 4-mikrofonowa
Podwójne głośniki (3 W × 2)
Podwójne głośniki (3 W × 2)
Podwójne głośniki (3 W × 2)
Podwójne głośniki (3 W × 2)
Tak
Tak
Tak
Tak
Kamera binokularowa + opcjonalna kamera na nadgarstek
Kamera binokularowa + opcjonalna kamera na nadgarstek
Podwozie z czujnikiem LiDAR + kamera binokularowa + opcjonalna kamera na nadgarstek
Podwozie z czujnikiem LiDAR + kamera binokularowa + opcjonalna kamera na nadgarstek
Opcjonalnie: NVIDIA Jetson Orin (40–100 TOPS)
Opcjonalnie: NVIDIA Jetson Orin (40–100 TOPS)
Opcjonalnie: NVIDIA Jetson Orin (40–100 TOPS)
Opcjonalnie: NVIDIA Jetson Orin (40–100 TOPS)
Tak
Tak
Tak
Tak
Dołączona do zestawu
Dołączona do zestawu
Dołączona do zestawu
Dołączona do zestawu
Około 1,5 godziny
Około 1,5 godziny
Około 1,5 godziny
Około 1,5 godziny
Tak
Tak
Tak
Tak
Tak
Tak
Tak
Tak
12 miesięcy
12 miesięcy
12 miesięcy
12 miesięcy
[1] Maksymalne obciążenie ramienia ulega znacznym zmianom w zależności od pozycji ramienia.
[2] W sprawie doboru efektora końcowego prosimy o kontakt z naszym działem sprzedaży.
[3] Więcej informacji można znaleźć w podręczniku dotyczącym dalszego rozwoju.
[4] Szczegółowe warunki gwarancji znajdują się w broszurze gwarancyjnej produktu.
[5] Powyższe parametry mogą się różnić w zależności od konkretnych warunków i konfiguracji; należy kierować się rzeczywistą sytuacją.
[6] Robot dwuramienny charakteryzuje się złożoną konstrukcją i niezwykle dużą mocą. Użytkownicy muszą zachować odpowiednią odległość bezpieczeństwa między ludźmi a robotem. Należy zachować szczególną ostrożność podczas użytkowania.
[7] Wygląd produktu może ulec zmianie. Prosimy o zapoznanie się z ostateczną wersją produktu.
[8] Ten produkt jest robotem cywilnym. Uprzejmie prosimy wszystkich użytkowników o powstrzymanie się od wprowadzania jakichkolwiek niebezpiecznych modyfikacji lub używania robota w sposób stwarzający zagrożenie.
[9] Więcej powiązanych warunków i zasad można znaleźć na stronie internetowej Unitree Robotics. Należy przestrzegać lokalnych przepisów i regulacji.
GDZIE KUPIĆ?
Używamy technologii takich jak pliki cookie do przechowywania i/lub uzyskiwania dostępu do informacji o urządzeniu. Robimy to, aby poprawić jakość przeglądania i wyświetlać (nie)spersonalizowane reklamy. Wyrażenie zgody na te technologie umożliwi nam przetwarzanie danych, takich jak zachowanie podczas przeglądania lub unikalne identyfikatory na tej stronie. Brak wyrażenia zgody lub jej wycofanie może niekorzystnie wpłynąć na niektóre cechy i funkcje.