Poznaj możliwości humanoidalne
Unitree H1-2
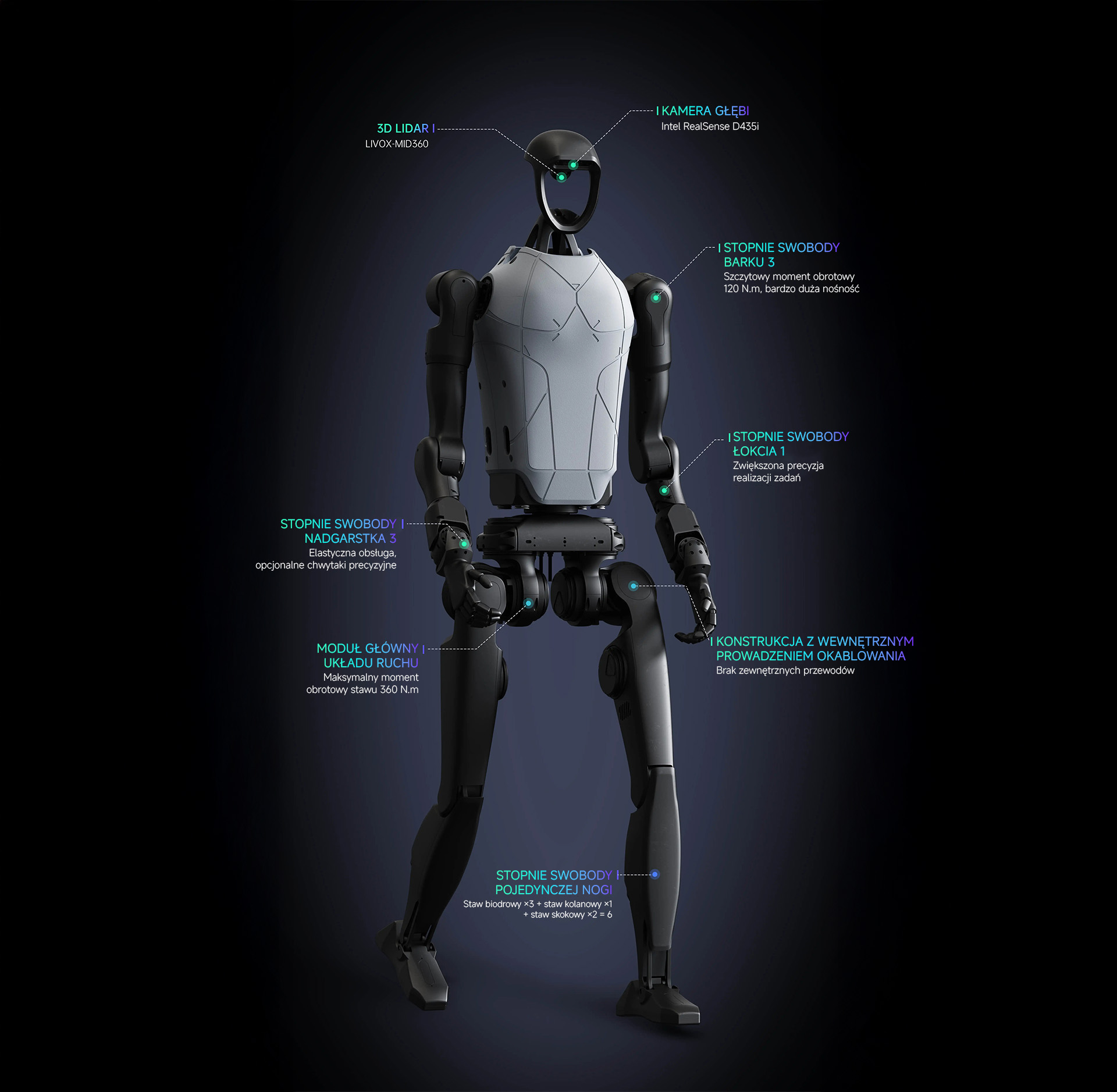
Unitree H1-2 to pełnowymiarowy robot humanoidalny nowej generacji, przeznaczony do zaawansowanych zastosowań badawczych i przemysłowych. Ma około 178 cm wzrostu i waży około 70 kg – rozmiarami odpowiada sylwetce dorosłego człowieka. Konstrukcja oferuje 27 stopni swobody i wysokie momenty obrotowe stawów (do 360 N.m w nogach i 120 N.m w ramionach), co bezpośrednio przekłada się na zwinne i dynamiczne ruchy całego ciała.
Sercem Unitree H1-2 jest zaawansowany układ napędowy, który oferuje jeden z najwyższych poziomów mocy, prędkości i zwinności w swojej klasie. Dzięki temu robot płynnie się porusza i zachowuje stabilność chodu nawet w trudnych warunkach terenowych. Wysoki moment obrotowy stawów nóg, sięgający 360 N.m, umożliwia dynamiczne ruchy i szybkie zmiany pozycji, co przekłada się na szerokie możliwości zastosowania.
Unitree H1-2 oferuje 27 stopni swobody, co pozwala na bardzo naturalne, złożone i płynne ruchy całego ciała. Robot może bez problemu biegać, skakać, wchodzić po schodach i wiele więcej. Ponadto maksymalny moment obrotowy stawów ramion na poziomie 120 N.m umożliwia precyzyjną manipulację. Wszystko to sprawia, że H1-2 porusza się w sposób zbliżony do człowieka – nie ogranicza się tylko do prostych sekwencji.
Robot widzi otoczenie dookoła siebie dzięki systemowi percepcji przestrzennej 360°, który łączy 3D LiDAR i kamerę głębi. Takie rozwiązanie pozwala na precyzyjne skanowanie przestrzeni i zbieranie danych o otoczeniu w czasie rzeczywistym. W praktyce oznacza to, że Unitree H1-2 potrafi bez problemu poruszać się w dynamicznym środowisku i reagować na zmiany.
Unitree H1-2 został zaprojektowany jako platforma uniwersalna, gotowa do dalszego rozwoju. Robot obsługuje ciągłe aktualizacje oprogramowania OTA, co umożliwia systematyczne rozszerzanie jego funkcjonalności, optymalizację algorytmów sterowania i poprawę wydajności bez konieczności ingerencji w konstrukcję sprzętową. To rozwiązanie znacząco wydłuża cykl życia produktu i pozwala na dostosowanie go do zmieniających się potrzeb projektowych i badawczych.
Za ruch i precyzję pracy robota odpowiadają silniki stawowe Unitree M107, które oferują bardzo wysoką wydajność, a dodatkowo poprawiają zwinność, szybkość reakcji, nośność i wytrzymałość.
Za ruch i precyzję pracy robota odpowiadają silniki stawowe Unitree M107, które oferują bardzo wysoką wydajność, a dodatkowo poprawiają zwinność, szybkość reakcji, nośność i wytrzymałość.
Wymiary
107 x 74 mm
Waga
1,9 kg
Wał drążony
Tak
Podwójny enkoder
Tak
Maks. moment obrotowy lub stosunek napięcia do ciężaru
189
5263
Maks. moment obrotowy LUB siła uciągu (odpowiednik ramienia o długości 3,5 cm)
360 N·m
10000 N
Unitree H1-2 został wyposażony w podwójny enkoder, który odpowiada za dokładne i stabilne odczyty. Takie rozwiązanie pozwala zachować precyzję ruchu bez obaw o zakłócenia. Dodatkowo możliwe jest opcjonalne zastosowanie wyższej mocy obliczeniowej w zależności od potrzeb projektu, a także dalsza rozbudowa i dostosowywanie zasobów do coraz bardziej złożonych zastosowań – producent przewiduje możliwość instalacji do pięciu płyt wewnątrz korpusu.

Model H1-2 wyróżnia się starannie przemyślaną budową. Wewnętrzne prowadzenie okablowania sprawia, że wszystkie przewody są zabudowane w korpusie robota, co upraszcza konstrukcję i zapewnia większą swobodę ruchów. Z kolei ergonomiczna, bioniczna forma obudowy nadaje urządzeniu spójny, technologiczny charakter.
Przejdź do wersji na komputer lub tablet
Główne wymiary
H1-2
Wysokość, szerokość i grubość (pozycja stojąca)
(1503 + 285) mm × 510 mm × 287 mm
Długość uda i łydki
400 mm × 2
Całkowita długość ramienia
685 mm
Stopnie swobody każdej nogi
6 (staw biodrowy ×3 + staw kolanowy ×1 + staw skokowy ×2)
Stopnie swobody każdego ramienia
7 (bark ×3 + łokieć ×1 + nadgarstek ×3)
Masa całkowita
Ok. 70 kg
Łożyska wyjściowe stawów
Przemysłowe łożyska krzyżowe o wysokiej precyzji i dużej nośności
Silnik główny stawu
Silnik PMSM z wirnikiem wewnętrznym o niskiej bezwładności i dużej prędkości (silnik synchroniczny z magnesami trwałymi, lepsza szybkość reakcji i rozpraszanie ciepła)
Maksymalny moment obrotowy jednostki stawowej
Staw kolanowy: ok. 360 N.m
Staw biodrowy: ok. 220 N.m
Staw tułowia: ok. 220 N.m
Staw skokowy: ok. 75 × 2 N.m
Mobilność
Prędkość ruchu < 2 m/s
Akumulator
Pojemność akumulatora: 15 Ah (0,864 kWh)
Maksymalne napięcie: 67,2 V
Moc obliczeniowa sterowania i percepcji
Konfiguracja standardowa: Intel Core i5 (funkcje platformowe), Intel Core i7 (rozwój użytkownika)
Konfiguracja opcjonalna: Intel Core i7 lub Nvidia Jetson Orin NX (do trzech jednostek)
Konfiguracja czujników
3D LiDAR + kamera głębi
Dodatkowa dłoń
Opcjonalna Dex5-1 lub inne dłonie oburęczne
Wydajność stawów ramienia (moment szczytowy)
Bark: ok. 120 N.m
Łokieć: ok. 120 N.m
Nadgarstek: ok. 30 N.m
Standardowe obciążenie ramienia
Szczytowe: ok. 21 kg
Znamionowe: ok. 7 kg
GDZIE KUPIĆ?
Używamy technologii takich jak pliki cookie do przechowywania i/lub uzyskiwania dostępu do informacji o urządzeniu. Robimy to, aby poprawić jakość przeglądania i wyświetlać (nie)spersonalizowane reklamy. Wyrażenie zgody na te technologie umożliwi nam przetwarzanie danych, takich jak zachowanie podczas przeglądania lub unikalne identyfikatory na tej stronie. Brak wyrażenia zgody lub jej wycofanie może niekorzystnie wpłynąć na niektóre cechy i funkcje.